 189 1406 8108微信同号189 1406 8108微信同号
189 1406 8108微信同号189 1406 8108微信同号测量原理
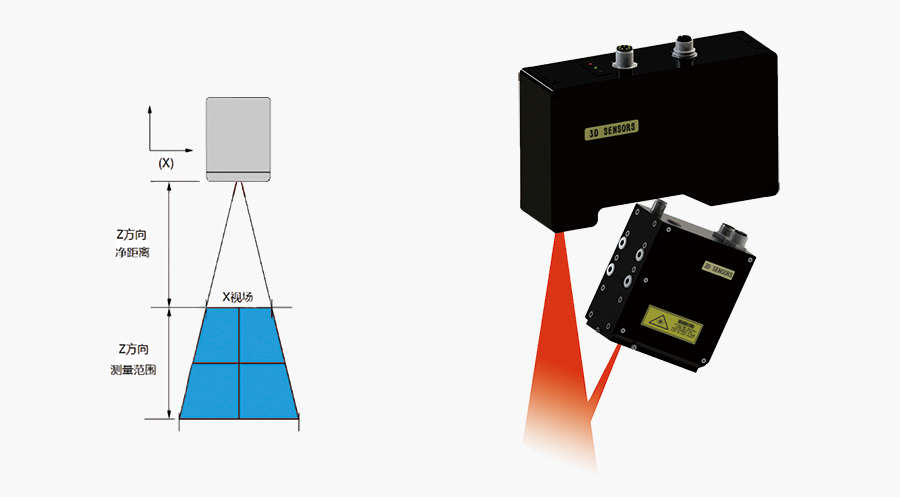
利用激光三角法,通过柱面物镜将激光扩散为线激光后投射在目标物表面形成漫反射。使反射光在CMOS上成像后,通过检测位置及形状的变化测量位移和形状。

丰富的端口
千兆比特Ethernet(GigeVision)直连用户PC
支持IO触发和编码器输入
支持激光远程连锁输入
多样应用领域
测量间距,轮廓,台阶,角度等
缺陷检测、平面度检测,物品定位
轮廓跟踪、尺寸测量、3D扫描、机器人应用
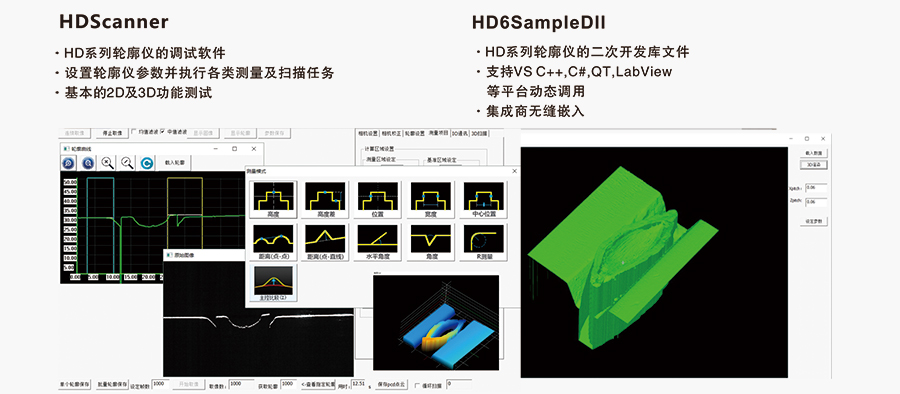
灵活强大的软件
功能丰富灵活的动态链接库,支持C++,C#,JAVA,VB,Python等语言调用
支持VS,QT等二次开发环境
适合集成商无缝嵌入自身系统
支持定制特殊算法,应用于焊缝跟踪,胶路综合检测,手机装配等场合
软件
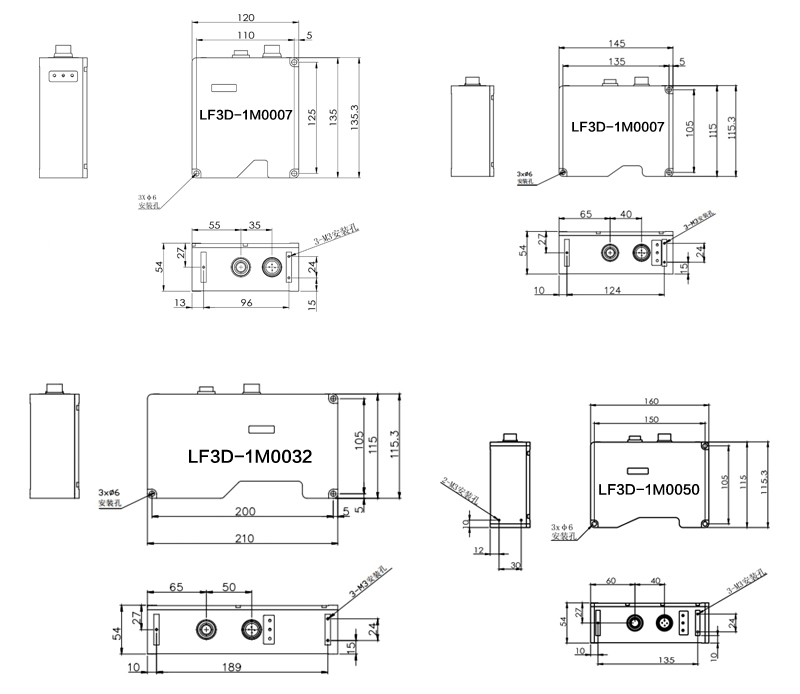
LF3D-1M系列传感器型号及参数
| 型号 |
X 最大视场 (mm) |
Z 净距离 (mm) |
Z 测量范围 (mm) |
X 分辨率 (mm) |
Z 分辨率 (mm) |
Z线性 精度 (%) |
Z重复 精度 (mm) |
|
|
激 光 轮 廓 传 感 器 |
LF3D-1M0007(蓝光) | 7 | 27 | 6 | 0.007 | 0.0006 | ±0.2 | 0.001 |
| LF3D-1M0020(蓝光) | 20 | 60 | 20 | 0.021 | 0.0017 | ±0.2 | 0.002 | |
| LF3D-1M0032(蓝光) | 32 | 77 | 20 | 0.035 | 0.0028 | ±0.2 | 0.003 | |
| LF3D-1M0050(蓝光) | 50 | 180 | 50 | 0.058 | 0.015 | ±0.2 | 0.003 | |
| LF3D-1M0090(蓝光) | 90 | 135 | 90 | 0.11 | 0.024 | ±0.2 | 0.003 | |
| LF3D-1M0150(红光) | 150 | 300 | 160 | 0.185 | 0.047 | ±0.3 | 0.004 | |
| LF3D-1M0200(红光) | 200 | 350 | 125 | 0.245 | 0.064 | ±0.3 | 0.004 | |
| LF3D-1M0300(红光) | 300 | 550 | 210 | 0.394 | 0.126 | ±0.3 | 0.005 | |
| LF3D-1M0500(红光) | 500 | 400 | 400 | 0.792 | 0.254 | ±0.3 | 0.007 | |
| LF3D-1M0600(红光) | 600 | 500 | 400 | 0.994 | 0.365 | ±0.3 | 0.008 | |
| LF3D-1M0800(红光) | 800 | 600 | 500 | 1.269 | 0.408 | ±0.4 | 0.01 | |
| LF3D-1M1100(红光) | 1100 | 900 | 600 | 1.758 | 0.565 | ±0.4 | 0.013 | |
苏州市高新区马运路298号




